什么是有状态pod,即pod的运行状态与该pod耦合,当发生pod调度时新创建的pod必须和原有pod保持一致的状态,否则会出现状态丢失。前面我们所学习的pod都是由RC或RS创建的,然而他们无法满足pod对状态的需求。于是我们有了StatefulSet,它是专门定制的一类应用,这类应用的每个实例都是不可替代的个体,都拥有稳定的名字和状态。
StatefulSet和RS或RC对比
RS或RC的实例挂掉后,会重新创建一个与之前并不相关的实例。而对SS来说,当一个实例挂掉后,新创建的实例会保持原有实例的名称、网络和状态。下面我们来看它是如何做到的
稳定的网络标识
与RS不同,SS创建的pod拥有规则的命名和主机名,这样方便管理。
由于每个有状态的pod之间的都是不一样的,所以经常需要定位到某一具体的pod,所以一个SS要求我们创建一个用来记录每个pod网络标记的headlessService。通过这个service,每个pod将拥有独立的DNS记录,这样集群中其它的pod就能通过主机名方便地找到它。
至于扩缩容,pod的命名是依照其先后顺序的索引,缩容时是先删除索引号最大的那个pod,这个比较好明确。且为了保证分布式应用的安全性,缩容时k8s每次只会操作一个pod实例,以免同时操作多个pod实例带来的潜在的数据丢失风险。
pod的专属存储
RS由于pod是无状态的,因此再多pod实例都是当做一个实例看待,因此所有实例共享同样的卷。SS由于需要保存实例状态,因此每个pod实例需要单独的存储卷,这是通过为每个pod实例绑定一个卷声明做到的。如下

新增pod时,会使用SS的PVC模板创建新的PV和PVC。删除pod时,由于数据的重要性,为防止误删,k8s只会删除pod,对应的PV和PVC都不会释放,而是需要用户手动删除。如果不手动删除,当再次创建pod时,之前的PV和PVC会被重新挂载到该pod上。该pod也会运行到和删除之前一样的状态。

at-most-one
一种场景:对于有状态pod,如果因为k8s对pod状态判断不准确,导致在一个pod还在运行时又创建了一个新的pod,产生了两个pod抢夺状态的情况,这是不被允许的。因此SS必须保证pod有at-most-one语义。实现方式为,如果SS无法确定一个pod的状态,将拒绝扩容的请求,此时需要用户手动强制删除该pod。
使用SS
使用SS部署应用需要按照如下三步走
- 创建存储数据文件的持久卷
- 创建一个headless的控制Service
- 创建SS本身
前两个的创建不再多说,可以查看前面有关服务和卷的章节,这里只说创建SS,yaml文件如下。SS创建pod时,由于有状态集群在两个节点之间的竞争是非常敏感的,因此node是一个启动成功再启动新的pod,故速度会比较慢。
1 | apiVersion: apps/v1beta1 |
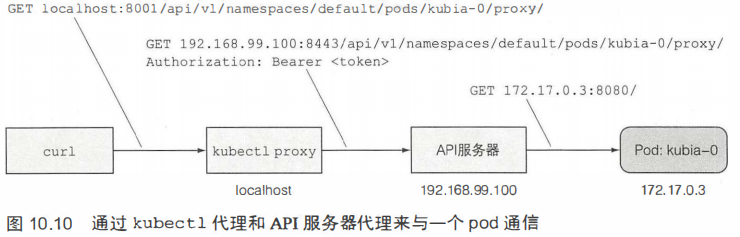
创建SS后,就可以开始使用了。最简单的方式就是使用Kubernetes API进行访问。还记得之前说的Kubectl proxy吗,可以在本地运行一个代理,然后通过代理访问API。命令如下
1 | API 路径 |
此时的访问结构如下
在SS中发现伙伴pod
如何在一个有状态pod中找到同SS中的另一个pod呢?肯定不能通过Kubernetes API访问,这会使应用和k8s耦合。答案是使用SRV记录。SRV记录是用来指向提供指定服务的服务器的主机名和端口号。k8s通过一个headless service创建SRV记录来指向pod的主机名。当一个pod想要获取SS中其它pod列表时,要做的只是触发一次SRV DNS查询,而每种语言都提供了特定的方式。对于命令行,可以通过dig查看
1 | dig SRV kubia.default.svc.cluster.local |